Différences de calcul entre Tom Tom et Here
-
Bonjour à tous,
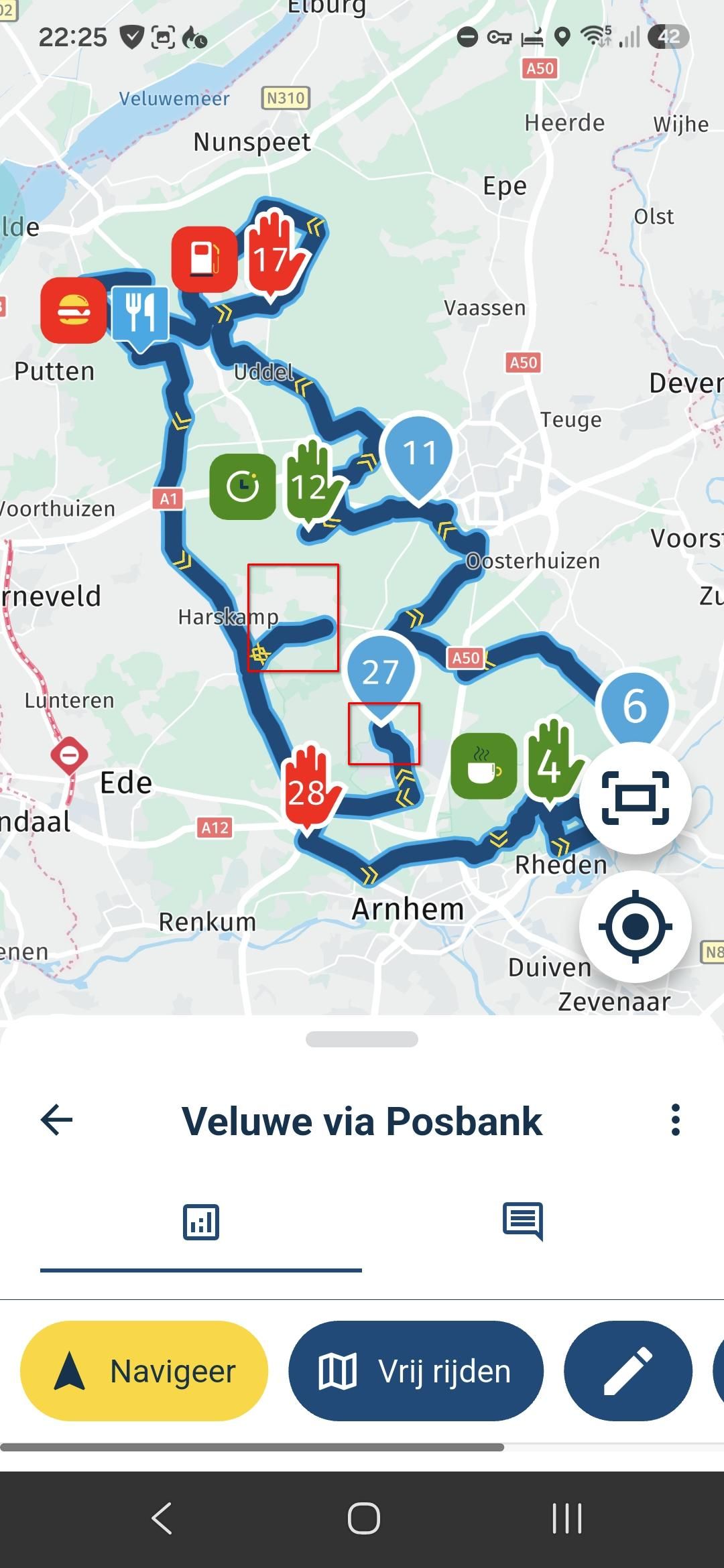
Quand je crée un itinéraire, j'utilise Tom Tom pour sa fonction routes sinueuses que je ne trouve pas avec HERE.
Une fois l'itinéraire validé, j'élargis pour poser automatiquement des points de route tous les 5 - 6 kilomètres puis je relance le calcul avec HERE qui est plus compatible avec mon GPS Garmin.Avec cette méthode, je me suis rendu compte il y a trois jours que HERE tient compte d'actualités ignorées par Tom Tom, un pont fermé dans mon cas (point de route 22).
Je viens de créer un itinéraire vers Manderscheid et j'ai un nouveau conflit (point de route 43) entre le calcul TomTom et le calcul HERE, ce dernier me fait systématiquement une boucle ignorée par Tom Tom.
J'ai fait des recherches pour tenter de comprendre la raison de cette boucle, mais rien ne semble justifier cette interprétation différente.Aujourd'hui, je lance la création d'un nouveau road-book vers Bad Münstereifel et là, rebelote ! exactement le même problème de route validée par Tom Tom et refusée par HERE. (voir points 3, 5 et 6)
Avez-vous une explication ?
Voici les liens des trois itinéraires :
Merci
-

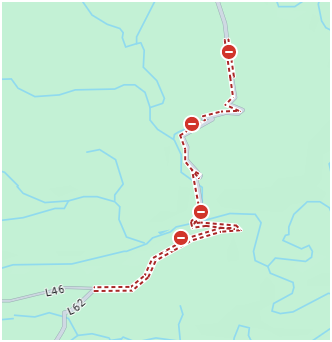
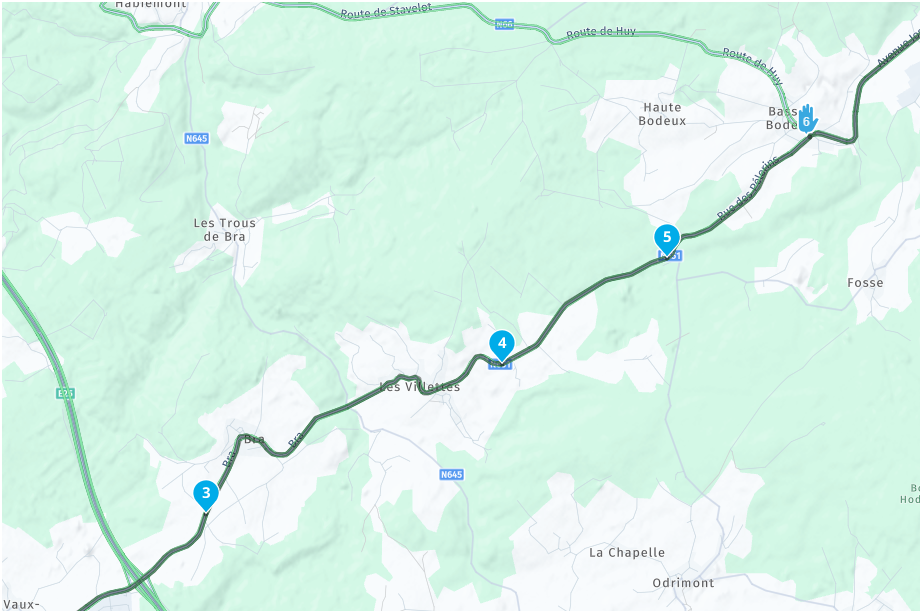
De eerste 2 routes zijn gesloten, dsu dan maakt de navigatie een omweg, de 3e kan ik geen fout ontdekken
-
TomTom a une méthode de calcul différente de celle de Garmin, de sorte que les itinéraires ne correspondent pas toujours. Les routes sinueuses et les différences en altitude sont typiques de TomTom, mais la version Gold de MRA vous permet de choisir la méthode de calcul de TomTom. Vous pouvez également comparer l'itinéraire de TomTom avec celui de Here. S'ils sont différents, vous devez déplacer stratégiquement quelques points intermédiaires jusqu'à ce que les deux itinéraires correspondent. Dans la plupart des cas, cela fonctionne, mais parfois ce n'est pas le cas ! Dans ce cas, vous devez faire preuve d'un peu d'ingéniosité pour faire correspondre les deux calculs. Il arrive qu'un itinéraire soit inexistant pour l'un des deux ou que la sens de la circulation n'ait pas encore été ajusté. Les cartographes devraient également actualiser au maximum les informations récentes.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login-
012159
-
-436973
-
010187
-
1313236
-
0101.3k
-
08754
-
03107
-
04103